| 06 Jan 2020
| 06 Jan 2020
Modelling and model verification of an autonomous threshold sensor for humidity measurements
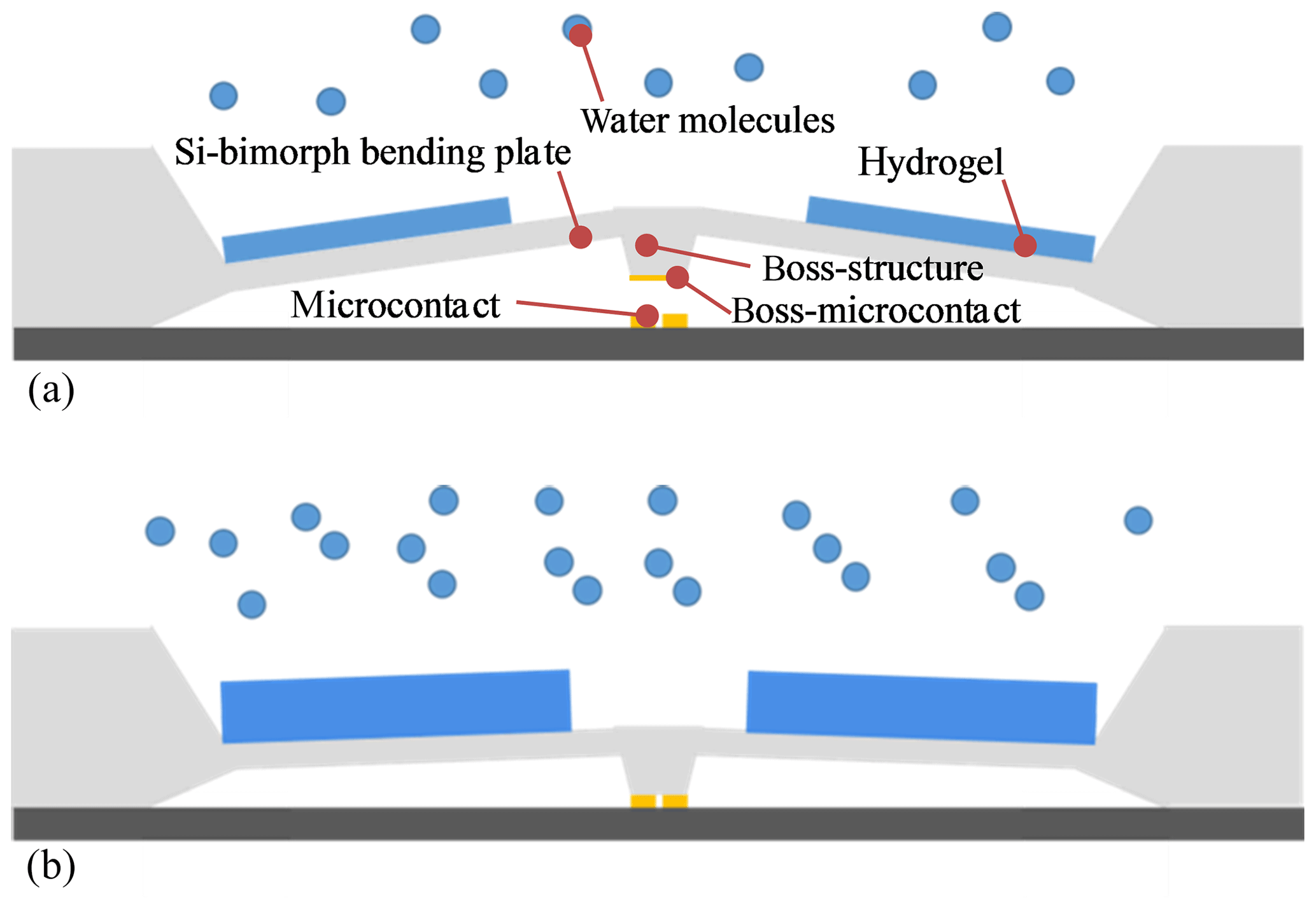
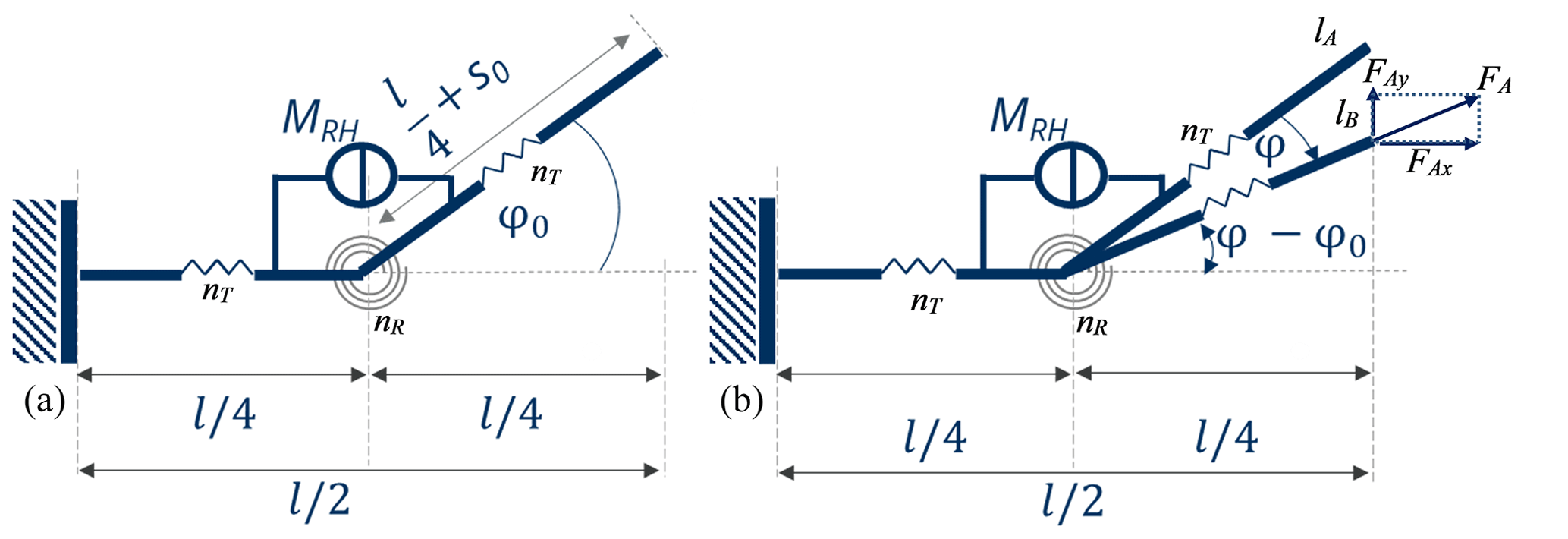
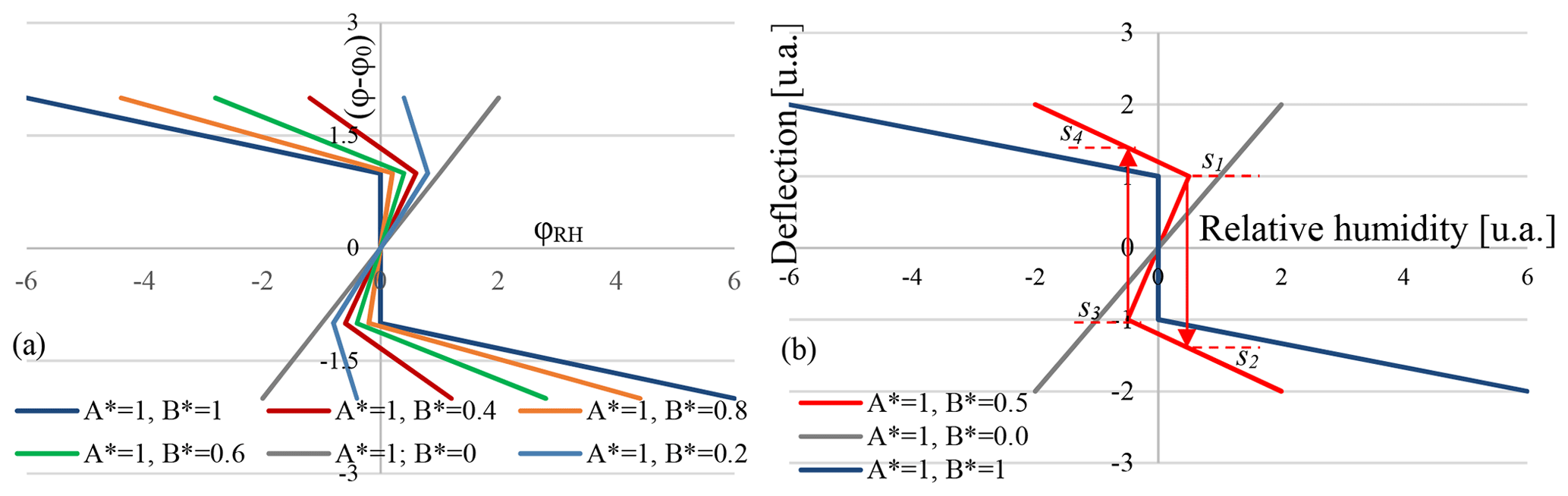
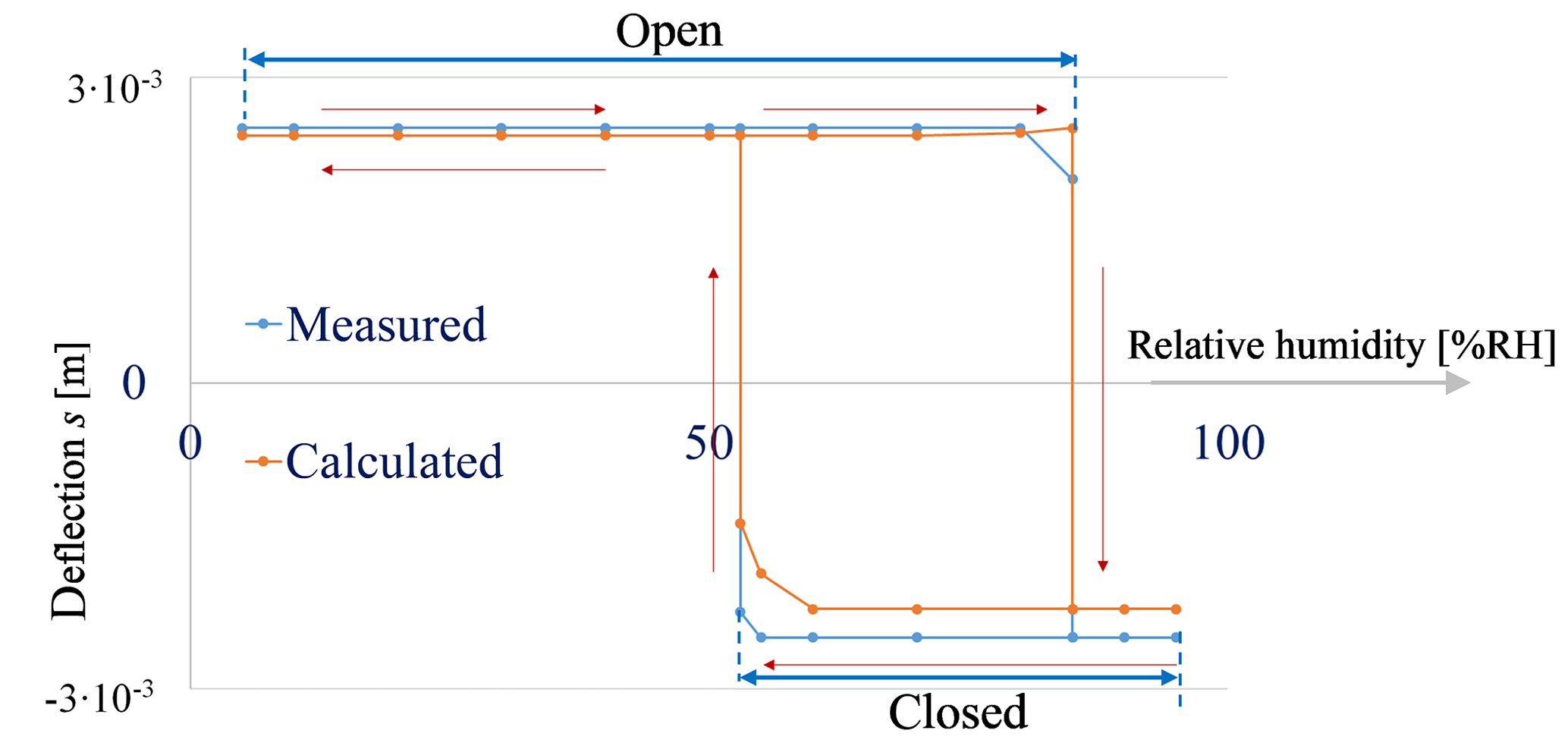
Autonomous sensors that receive their energy from an energy harvester or directly from the environment have the potential to save energy for applications in numerous sectors. For humidity sensing, the swelling behaviour of a water vapour-sensitive hydrogel is used. To trigger an electrical contact the mechanical energy is taken from the hydrogel swelling by the bimorph effect. As long as a defined threshold is not reached, the electrical microcontact remains open. By passing the threshold value, a switching will be triggered causing the closure of the contact. This sensor principle does not need any electrical power supply because the switching power is provided directly by the surrounding humidity as quantity to be measured. For the description of the deflection versus the hydrogel pattern of such a sensor, a model was developed by means of the beam theory. Goal of the model was to derive design guidelines for the dimensioning of the sensors bending plate and the patterned hydrogel layer. Experiments then should show the applicability of the model approaches. The deflection of the bending plate depends on the ratio between the lengths of the uncoated and the coated part of the bending plate where the maximum occurs at a ratio of ca. 0.5. The swelling behaviour of the hydrogel shows a high sensitivity with regard to slight changes in relative humidity. This can be used for humidity threshold sensors that open and close microcontacts with respect to very small changes in relative humidity. To avoid voltage peaks and arcs during the switching process that could arise and destroy the microcontact, a bistable characteristic with hysteresis is needed. Experiments demonstrate the feasibility of this concept and are in good agreement with the modelling results.